原创————MLS平滑和Rusu的RMLS
MLS是点云领域内比较重要,并且也是用的比较多的平滑方法,Pcl封装了MLS的函数并且可以利用MLS来估算点云的法向,在此基础上,Rusu曾提出更为鲁棒的RMLS算法,可以抑制在sharp边缘处被平滑成光滑的曲面。
普通MLS算法
原始点云c 生成的曲面s
遍历c中每一点x,并且获取p点周围的邻域点集
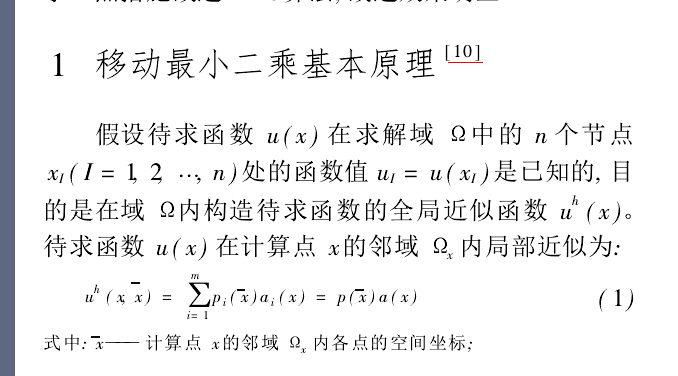
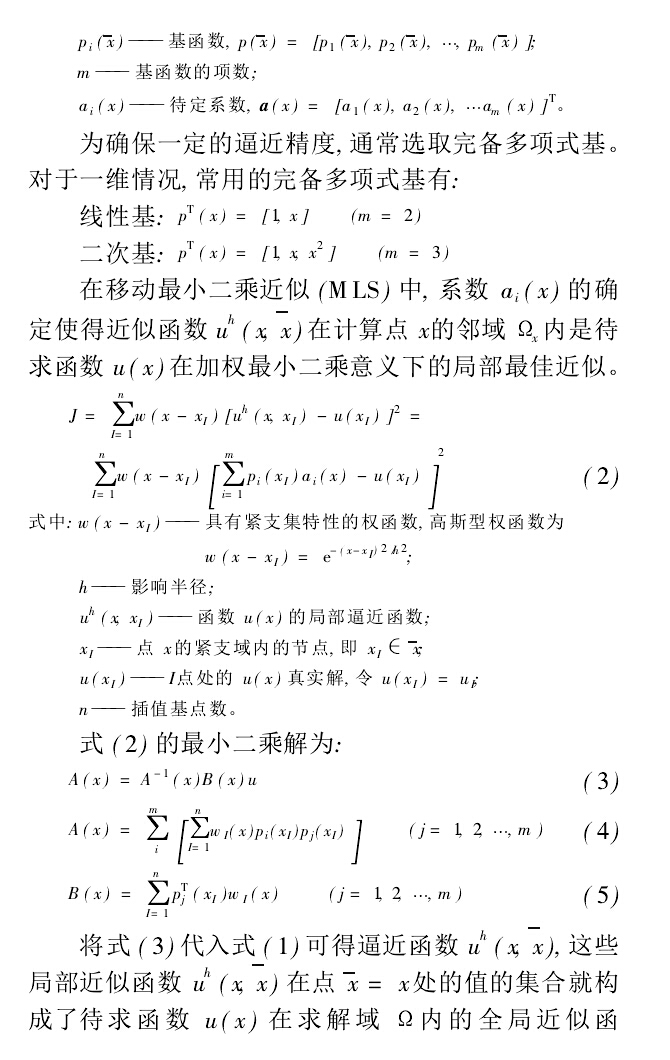
拟合函数f(x)=∑ p(x)a(x)
P(x)为设定好的阶次函数,a(x)为与x有关的函数
J=∑ w(x)(f(x)-y) 求取最小,y为c中x对应的y值,f(x)为拟合的值,w为权重函数
依据此获取全局的a(x)函数
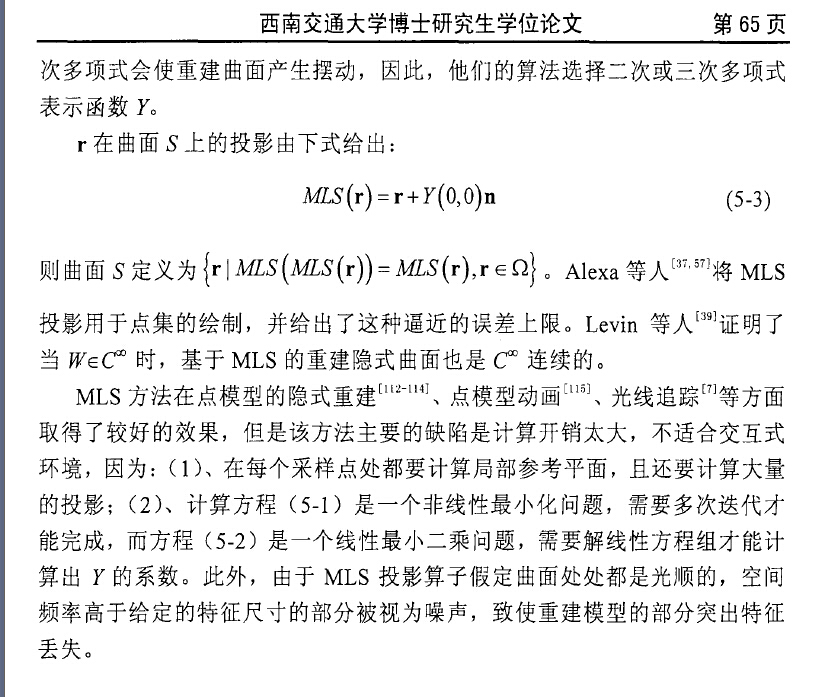
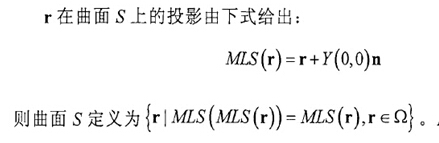
最终将所有的c中的x点拉至拟合的曲面s上,最终满足下式
Rusu的RMLS算法
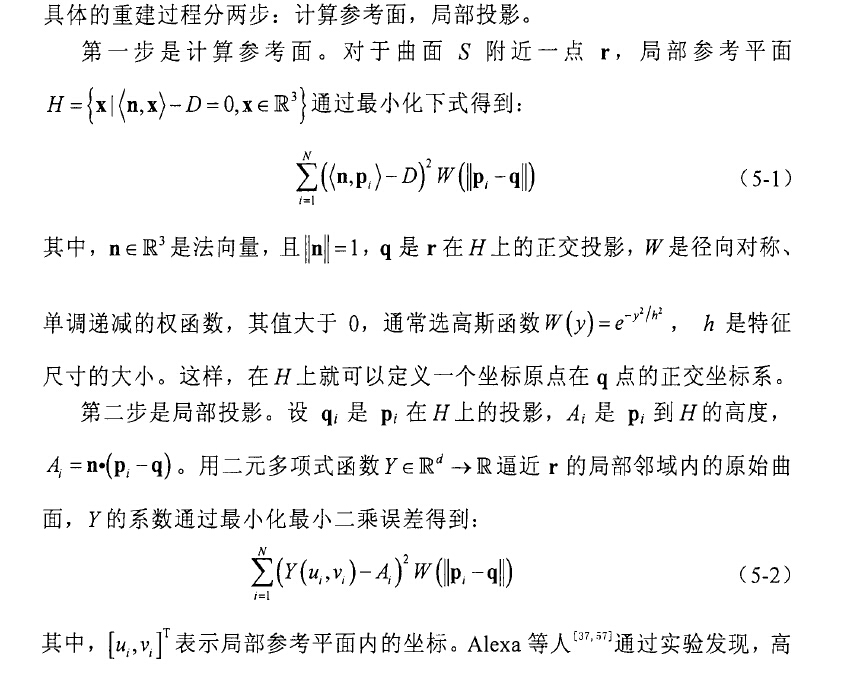
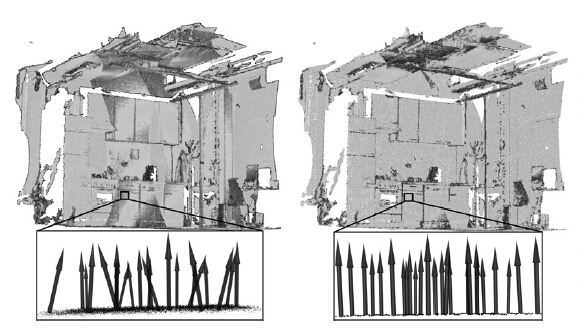
和普通mls不同的是,在进行逼近拟合之前,需要进行参考面拟合,为了剔除外点,05年采用的是带权重的RANSAC进行参考面拟合,07年借鉴了前人的算法,采用了极大似然进行参考面的估计,之后剔除了外点,只用参考面上的进行mls拟合。
这样在边缘地带可以防止2个平面交界处平滑成曲面。
附:MLS的参考