原创————MLS平滑和Rusu的RMLS
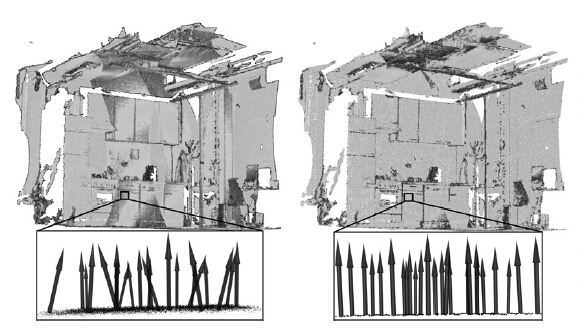
MLS是点云领域内比较重要,并且也是用的比较多的平滑方法,Pcl封装了MLS的函数并且可以利用MLS来估算点云的法向,在此基础上,Rusu曾提出更为鲁棒的RMLS算法,可以抑制在sharp边缘处被平滑成光滑的曲面。
MLS是点云领域内比较重要,并且也是用的比较多的平滑方法,Pcl封装了MLS的函数并且可以利用MLS来估算点云的法向,在此基础上,Rusu曾提出更为鲁棒的RMLS算法,可以抑制在sharp边缘处被平滑成光滑的曲面。
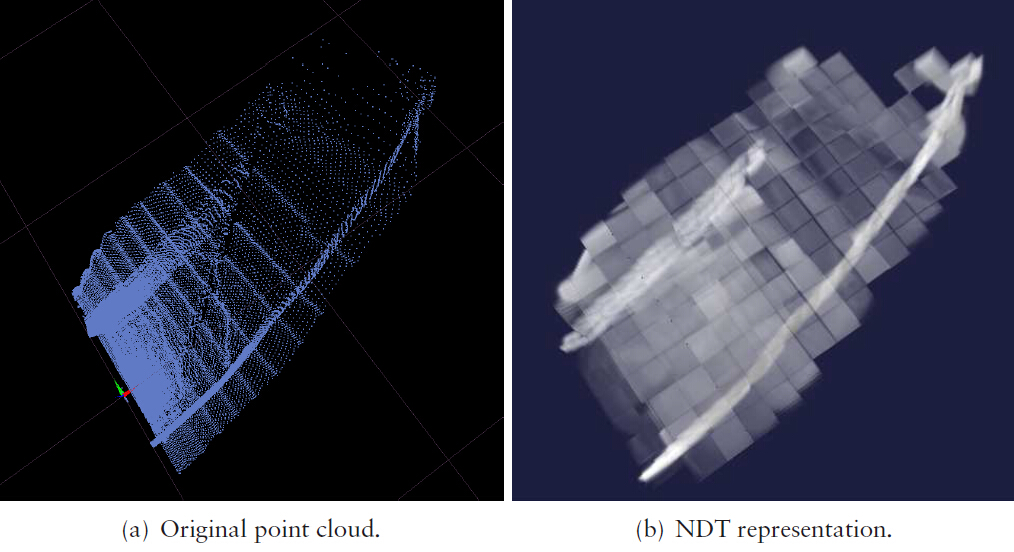
目前三维配准中用的较多的是ICP迭代算法,需要提供一个较好的初值,同时由于算法本身缺陷,最终迭代结果可能会陷入局部最优。本文介绍的是另一种比较好的配准算法,NDT配准。这个配准算法耗时稳定,跟初值相关不大,初值误差大时,也能很好的纠正过来。
前面已经简单介绍了PCL和他的开拓者rusu,这篇博文是自己阅读完他的毕业论文后的记录,现给出记录与大家分享,有理解不对的地方可以共同交流。
这几天看到kinect fusion 的效果后,对其非常感兴趣,于是也想搭建一个kinect fusion 的框架自己玩玩,无奈PCL中kinfu的开源代码一直是测试版本,并没有release发布版,于是只能默默的卸载之前安装的1.7.1版本换上PCL的测试版本。
最开始安装PCL,是直接利用all-in-one安装的1.6.0版本,但是PCL中有许多区域分割的新功能以及配准方面新出的NDT算法只有1.7以上的版本才能实现,所以从源码编译安装了当时的PCL的最高release版本1.7.1版本,目前PCL已经公开了1.7.2版本和一个测试的master版本。关于PCL公开的源码可以从PCL的github主页上下载。
https://github.com/PointCloudLibrary/pcl
1.7.1版本的具体安装步骤如下:
前文列举了搭建整个github个人主页所参考的链接和所有的必备知识,这篇博文主要针对一些细节地方出现的问题和解决办法简要叙述。
这是我的第一篇博客
利用github和hexo搭建而成
作为之前对网页代码一窍不通的小白来说
非常感谢这三位大神的博客带我入门